Programme(s)
Année de production
2021

© Cyril FRESILLON / Irisa / CNRS Images
20210098_0024
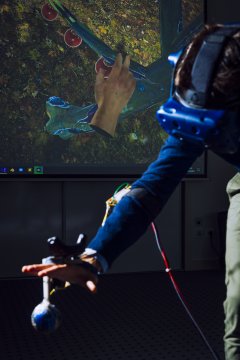
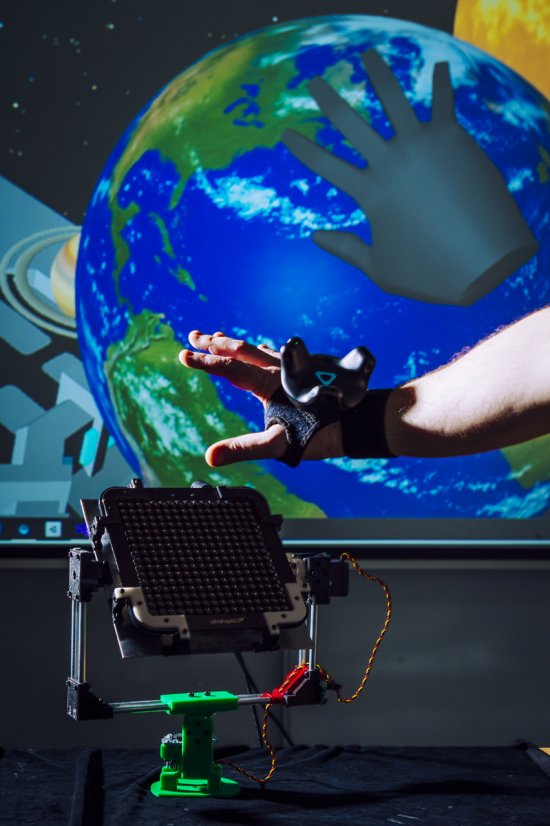
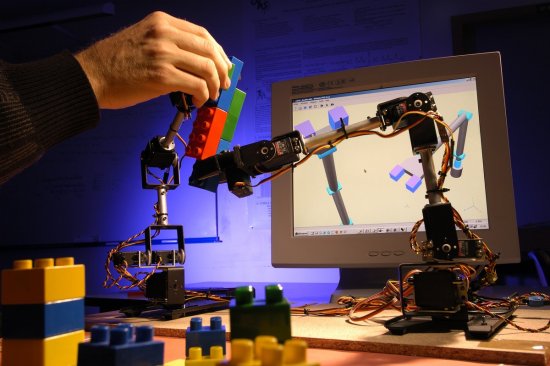
Test du système robotique PUMAH (Pan-tilt Ultrasound Mid-Air Haptics) pour les interfaces haptiques sans contact, développé par l’Irisa. L’interface qui est montée sur ce système recrée la sensation de toucher à distance, grâce à un réseau de haut-parleurs à ultrasons qui font vibrer la peau de son utilisateur. Le système Pan-Tilt PUMAH est capable de déplacer et d’orienter cette tablette, pour suivre la main d'un scientifique en train d'interagir avec un modèle virtuel du système solaire. Lorsque la main de l'avatar touche la planète Terre, l’interface est activée et focalise les ondes acoustiques sur la paume de l'utilisateur. Il ressent une légère vibration à cet endroit qui lui donne l’impression de toucher réellement la sphère. Le système PUMAH assure un positionnement optimal de l'interface haptique sans contact par rapport à la main de l'utilisateur, permettant une zone d'interaction 14 fois plus grande qu'en utilisant le dispositif seul. Un des objectifs de ce projet est d’améliorer l’immersion dans la réalité virtuelle, de rendre l’expérience plus réelle, grâce aux sensations tactiles. Aujourd'hui, le toucher est encore très peu utilisé par les technologies de réalité virtuelle qui se concentrent sur la vue et l’ouïe car ces sens sont plus faciles à solliciter. Ces recherches permettent aussi des avancées majeures dans la compréhension du sens du toucher. Elles s’inscrivent dans le projet européen H-Reality.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2021
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.